Motivation
The 4th Industrial Revolution is about to add thousands of millions of automated moving devices to the market that will represent a new demand for high-performance, accurate and affordable navigation. These devices cannot rely on expensive high-end GNSS systems due to their limited scalability.
Goal
The goal of the project is to develop a technology that provides accurate and real-time navigation for mass-market devices such as vehicles, drones or smartphones, among others. UNION technology will be validated and demonstrated for two relevant applications (verticals): road and Location Based Services, LBS (smartphones), although it can be used in other applications such as Aerial Unmanned Vehicles, AUV (drones). UNION, as a precise positioning solution, will improve:
- Continuity: especially in navigation sessions spanning hundreds of kilometres.
- Accuracy: UNION will represent a major breakthrough in mass-market oriented navigation solutions, reaching meter–level accuracy in smartphones and lane-level navigation in road applications.
- Availability of precise navigation any time
Solution
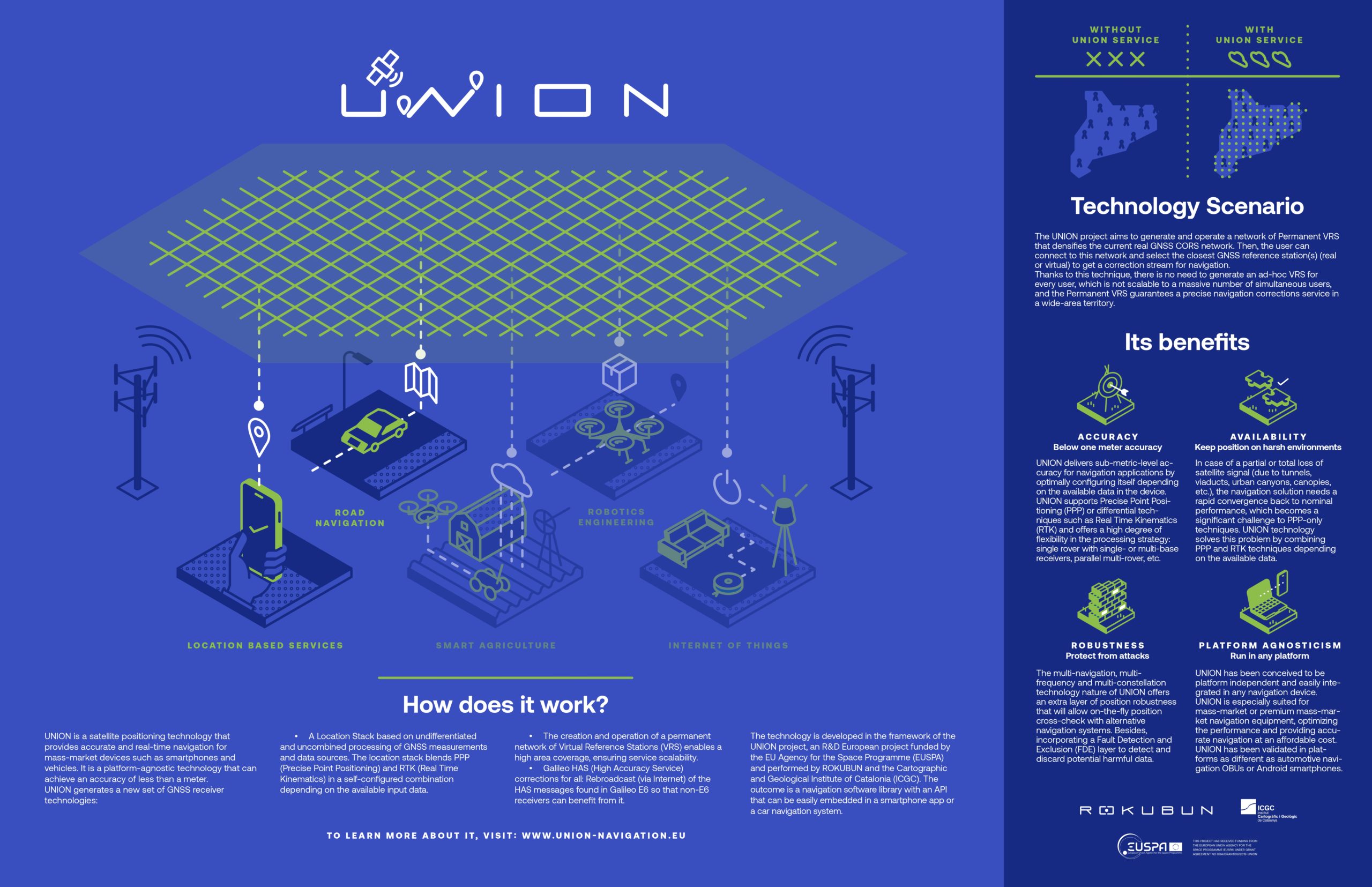
UNION is a satellite positioning technology that provides accurate and real-time navigation for mass-market devices such as smartphones and vehicles. It is a platform-agnostic technology that can achieve an accuracy of less than a meter.
UNION generates a new set of GNSS receiver technologies:
- A Location Stack based on undifferentiated and uncombined processing of GNSS measurements and data sources. The location stack blends PPP (Precise Point Positioning) and RTK (Real Time Kinematics) in a self-configured combination depending on the available input data.
- The creation and operation of a permanent network of Virtual Reference Stations (VRS) enables a high area coverage, ensuring service scalability.
- Galileo HAS (High Accuracy Service) corrections for all: Rebroadcast (via Internet) of the HAS messages found in Galileo E6 so that non-E6 receivers can benefit from it.
The outcome is a navigation software library with an API that can be easily embedded in a smartphone app or a car navigation system.
Besides, the UNION project aims to generate and operate a network of Permanent VRS that densifies the current real GNSS CORS network. Then, the user can connect to this network and select the closest GNSS reference station(s) (real or virtual) to get a correction stream for navigation.
Thanks to this technique, there is no need to generate an ad-hoc VRS for every user, which is not scalable to a massive number of simultaneous users, and the Permanent VRS guarantees a precise navigation corrections service in a wide-area territory.
Business model
The business model to exploit UNION’s value proposition is licensing the Software or Firmware to a third party.
Result
As of today, UNION’s location stack, called SPEAR, has performed very promising results.
Example 1: The preliminary SPEAR (Satellite Positioning Engine for Accurate Real-time Navigation, the navigation engine) performance from development test campaigns shows a horizontal error of less than 1 meter in open sky scenarios.
Example 2: Our location stack can locate a user with less than 0.4 meters of accuracy (lane level navigation) with a Virtual Reference Station located more than 100 km away from the rover.
Current state
The UNION project is still going on and will finish by the end of February 2023. Now, we are validating the UNION use cases in two verticals: automotive and Location Based Services (LBS), a.k.a. smartphones.
For more information about the project, please visit: www.union-navigation.eu or follow them on LinkedIn and Twitter.